mmSPLAM: Millimeter-Wave Simultaneous Passive Mobile Target Tracking and Environment Reconstruction
Xinyuan Wei, Jian Wang
Motivation:
WiFi sensing often treats the environment as interference, focusing on signal suppression.
Most mmWave SLAM systems localize the transceiver itself, not passive or non-cooperative targets.
Dedicated SLAM systems are expensive and complex.
Features:
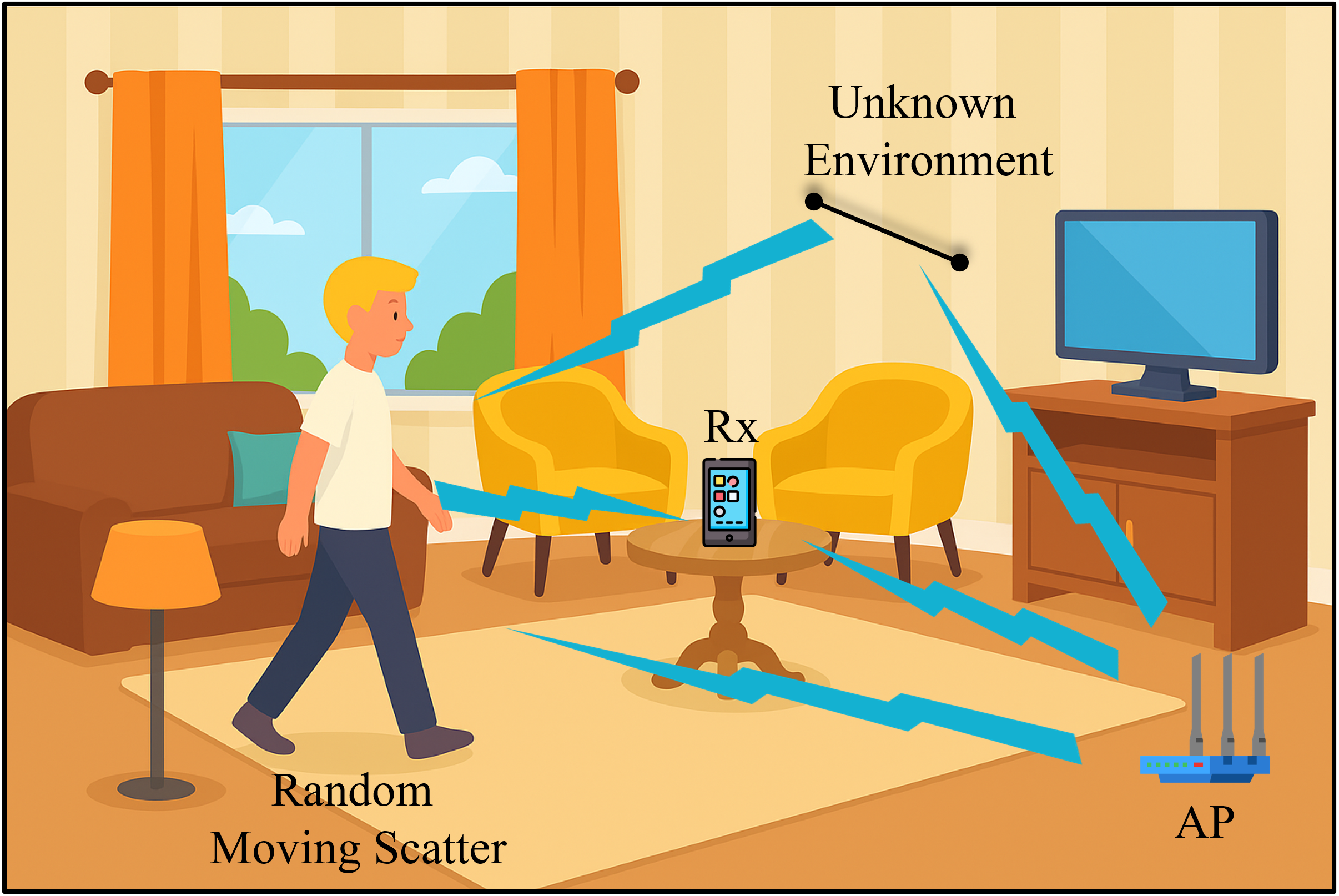
Passive millimeter-wave sensing without target cooperation.
Joint mobile target tracking and environment reconstruction.
No transmitter–receiver clock synchronization required.
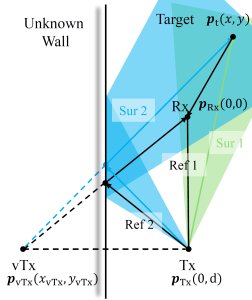
Geometric layout
Beam patterns
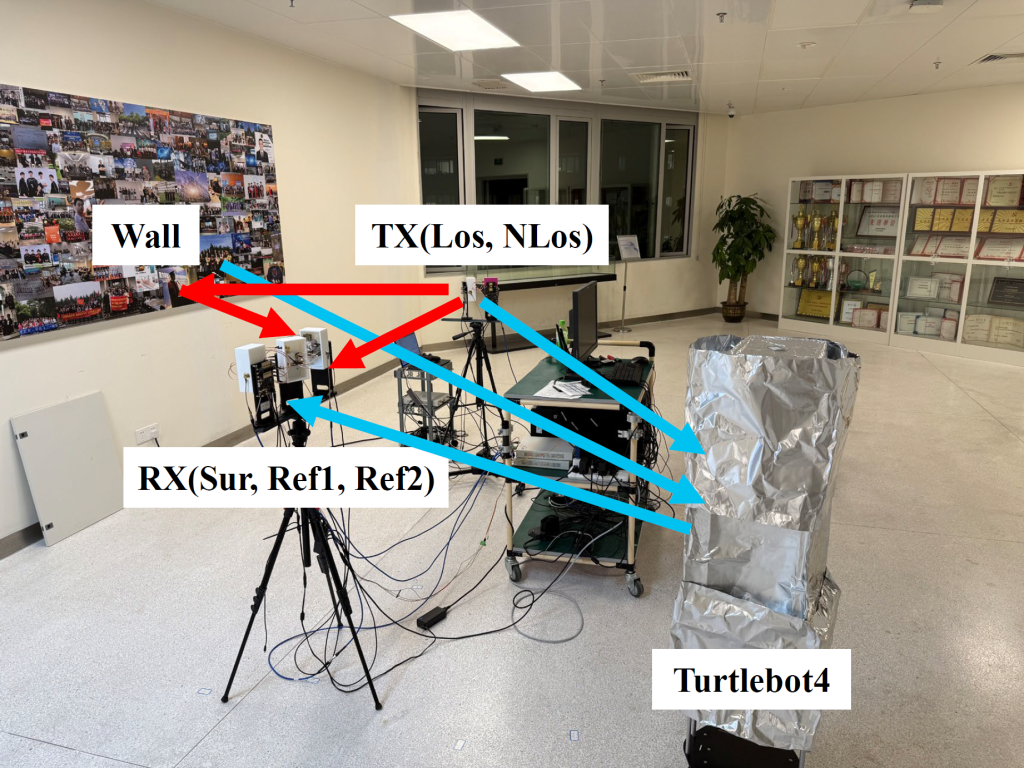
Experiment scene
The target trajectory is estimated by jointly exploiting two signal paths: one line-of-sight (LoS) path and one wall-reflected non-line-of-sight (NLoS) path. Each path provides a distinct Doppler measurement corresponding to a different geometric line, and the combination of these two Doppler constraints enables two-dimensional motion estimation of the passive target. Meanwhile, the wall-reflected path is modeled as a virtual receiver, whose location can be inferred from the observed reflections, allowing the wall position and environmental layout to be reconstructed without dedicated sensing hardware.
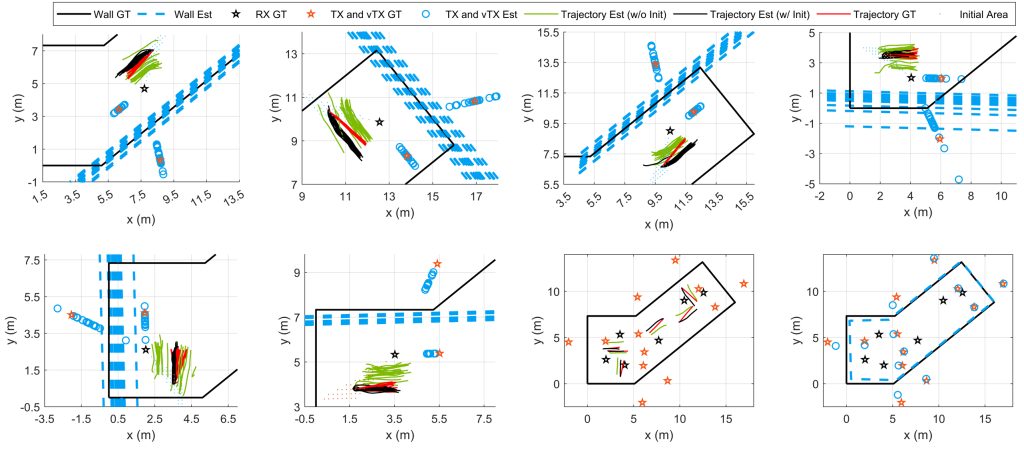
From left to right, the first six subfigures illustrate the estimated wall locations (Wall~1--Wall~6) together with the reconstructed trajectory of the moving scatterer. The last two subfigures present the averaged trajectory prediction over 20 repeated trials and the final room-layout reconstruction obtained by aggregating all wall estimates.