Low-Altitude Drone Sensing via Communication Signals
Project Overview: This project leverages downlink communication signals from LTE cellular base stations to sense and monitor low-altitude drone targets within the communication environment. By extracting channel parameters such as range, angle, and Doppler from the scattered signals of drones, the system enables precise passive tracking of drones. Notably, even when the initial position of a drone is unknown, increasing the number of receivers still allows decimeter-level tracking accuracy for various complex flight trajectories. Our developed passive tracking system can be densely deployed on urban rooftops and does not require prior knowledge of the drone’s initial position for tracking.
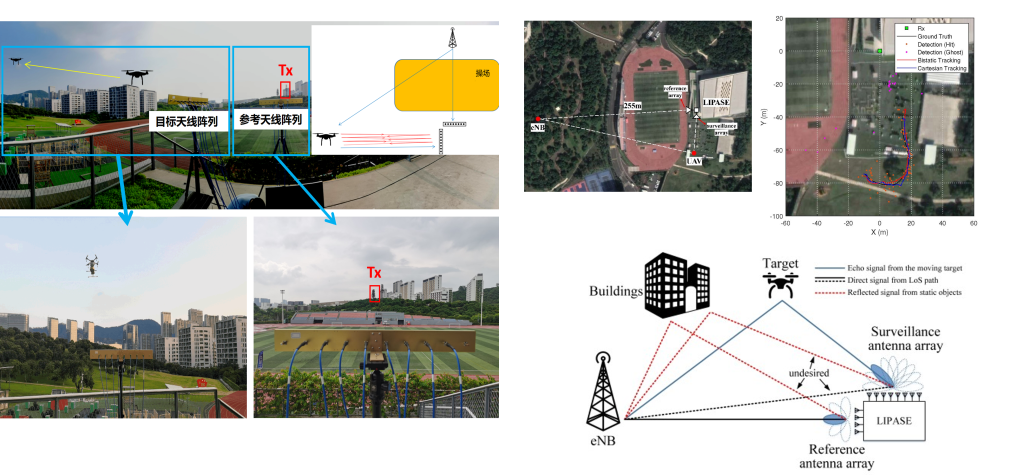
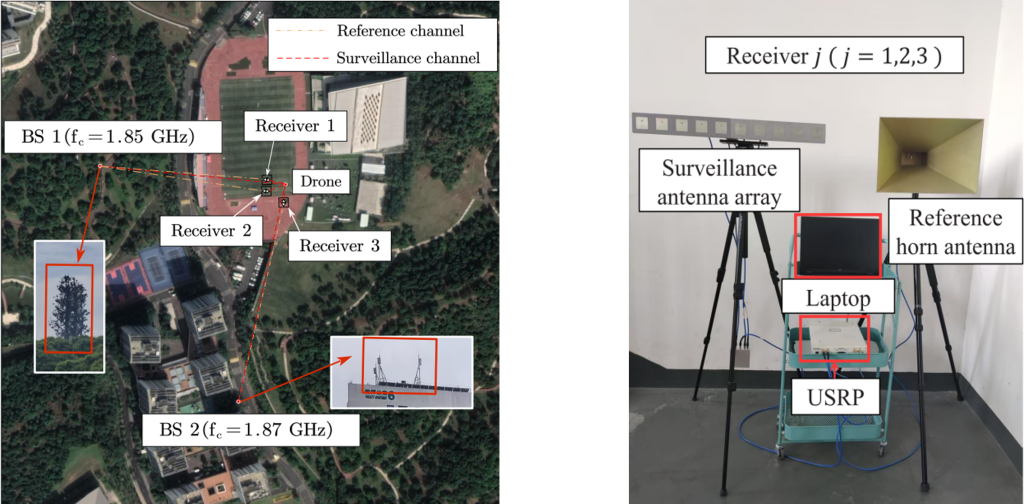
System Configuration: We track the trajectory of the target drone under both 1Tx-1Rx and multiTx-multiRx configurations. In the 1Tx-1Rx setup, range, angle, and Doppler information are jointly utilized for drone trajectory tracking. In the multiTx-multiRx configuration, tracking is performed using only Doppler information. For the multiTx-multiRx setup, the passive tracking system consists of 2 LTE cellular base stations and 3 receivers. Each receiver is equipped with 2 antennas: a reference antenna, responsible for receiving direct-path signals from the LTE base station, and asurveillance antenna, dedicated to capturing scattered signals from the target drone.
Passive Drone Tracking System Configuration and Experimental Scenario under 1Tx-1Rx Setup
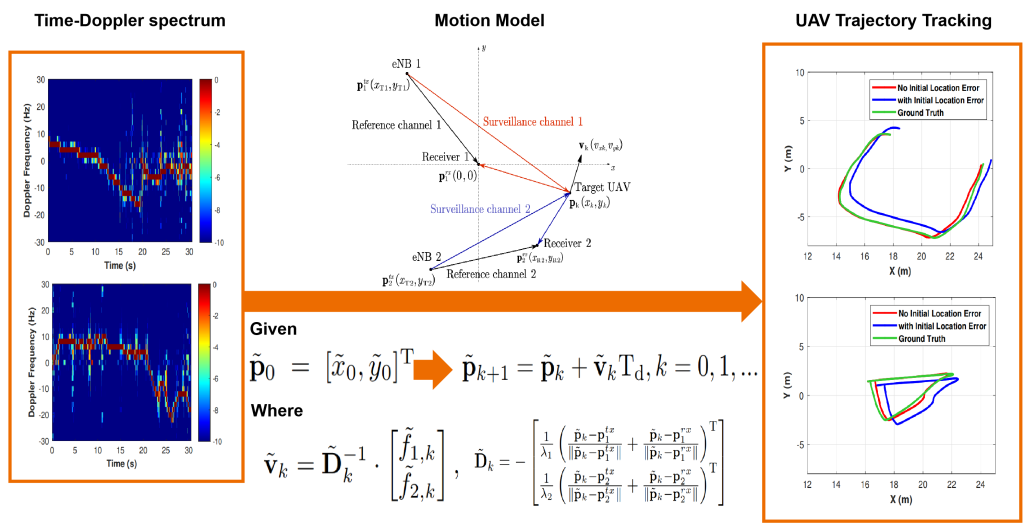
Passive Drone Tracking System Configuration under multiTx-multiRx Setup
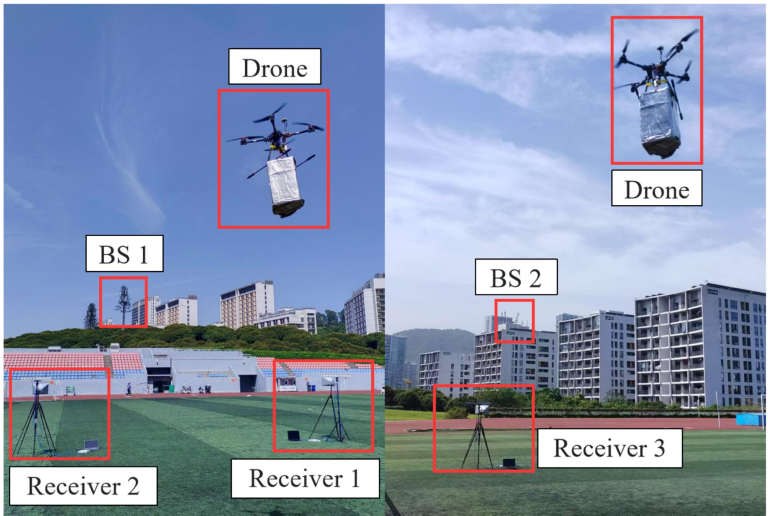
Passive Drone Tracking Experimental Scenario under multiTx-multiRx Setup
Tracking Performance:
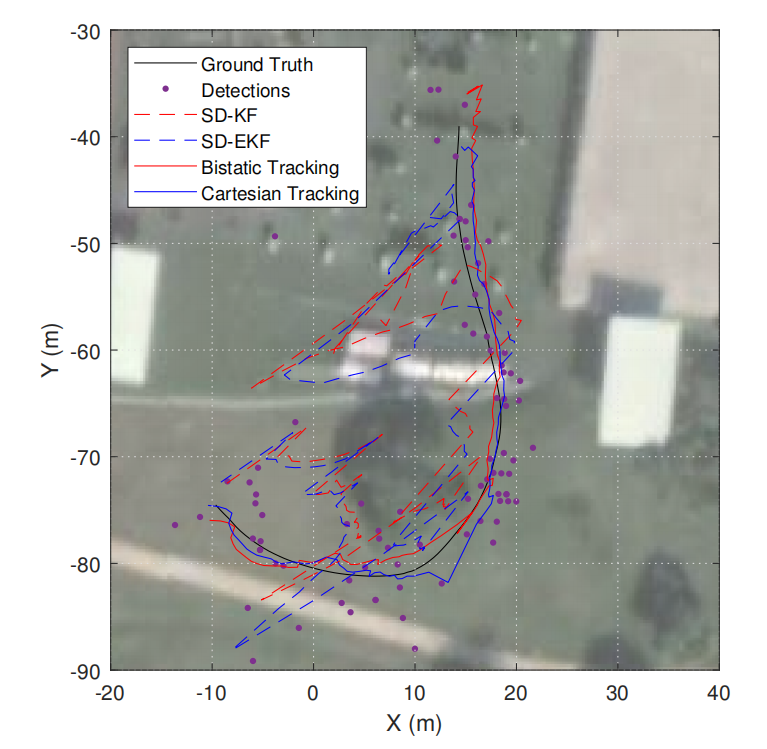
In the 1Tx-1Rx configuration, the proposed system achieves meter-level positioning error through Cartesian tracking.
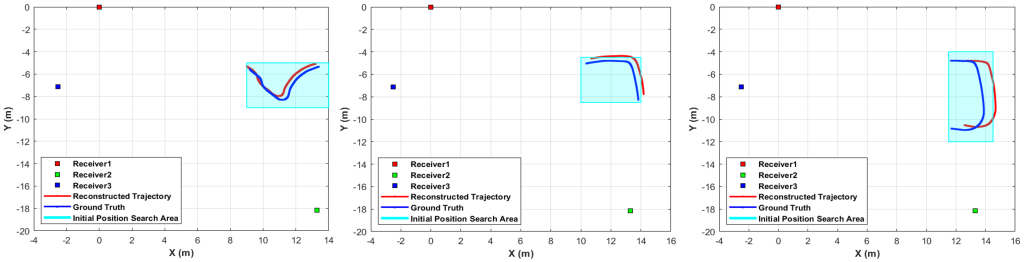
In the multiTx-multiRx configuration, when the drone’s initial position is known, 90% of the trajectory tracking errors are below 0.5 meters. Even when the drone’s initial position is unknown, 90% of the trajectory tracking errors are below 0.9 meters, still enabling decimeter-level trajectory tracking.
Drone Tracking Result under 1Tx-1Rx Setup
Doppler Detection and Drone Tracking Results with Known Initial Position under multiTx-multiRx Setup
Drone Tracking Results with Unknown Initial Position under multiTx-multiRx Setup
Open-Source Dataset: We provide captured real-world IQ data of drone-scattered signals along with corresponding ground-truth flight trajectory data (latitude and longitude information) to facilitate related research. Please click the link to access the dataset:Download Link
Contact Information: If you have any further questions regarding this project or the open-source dataset, please feel free to email: Chenqing Ji, 12332152@mail.sustech.edu.cn